Ran – Autonomous Underwater Vehicle (AUV)
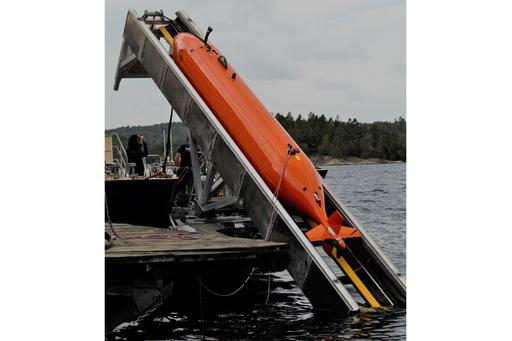
An autonomous underwater vehicle (AUV) can be used to explore beneath glaciers, thick sea ice, and in the deep ocean. For several years, the AUV Ran supported research at the University of Gothenburg, contributing unique data and discoveries. After Ran was lost beneath the Antarctic ice in January 2024, a new vehicle will now take her place. Ran II will continue the mission to advance understanding of ocean processes and climate change.
For many years, the autonomous underwater vehicle Ran contributed to research at the University of Gothenburg and frequently participated in R/V Skagerak expeditions.
Unlike a remotely operated vehicle, Ran was an autonomous underwater vehicle – pre-programmed to dive below the surface and make its own decisions based on information from its surroundings. This enabled Ran to reach extremely inaccessible environments beneath floating ice shelves and in the deep ocean.
Only a few in the world
Only a few research AUVs in the world possess such exceptional capability and navigational precision. The University of Gothenburg’s Ran was equipped with high-resolution acoustic sonars and other mapping instruments, allowing scientists to chart and study previously unexplored underwater terrain.
Ran was funded by the Knut and Alice Wallenberg Foundation through the nationally important infrastructure programme MUST (Mobile Underwater System Tools).
Delivered in 2018, Ran completed numerous successful missions and contributed valuable new knowledge, particularly from studies beneath Antarctica’s floating glaciers, where the risks were greatest and the discoveries most groundbreaking.
Pioneering research and education
According to Anna Wåhlin, Professor of Oceanography at the University of Gothenburg, Ran contributed not only to pioneering research but also to education and technology development during its years of operation.
During its active years, Ran was used for research, for training early-career scientists, and as a platform for testing and exercises within the Swedish AUV development initiative SMARC (Swedish Maritime Robotics Centre). Anna Wåhlin notes that this work has helped place Sweden at the forefront of AUV-based polar research internationally.
After Ran was lost beneath the West Antarctic ice in early 2024, a new chapter began. With a generous donation from Voice of the Ocean and Eric Douglas, a new vehicle will soon take her place.
Equipped with enhanced navigation, decision-support, and safety systems, Ran II will continue the mission to deepen our understanding of ocean processes and climate change.

Data, performance and equipment of Ran
Manufacturer: Kongsberg Maritime A/S, Horten, Norway
Model: Hugin
Length: 7.5 metres
Weight: 1850 kg (dry)
Speed: 1-7 knots, cruise speed 4 knots
Maximum dive depth: 3000 metres
Maximum dive length and time: 300 km and 36 h
Equipped with:
- multibeam echo sounder, Multibeam Kongsberg EM2040, 200-400 kHz, 0.7° x 0.7° beam width, swath coverage sector up to 140°
- conductivity, temperature and depth sensor (CTD), dual systems SeaBird 911 19plusv2
- oxygen sensor, SeaBird SBE43 (dual system)
- carbon dioxide sensor, Contros HydroC
- nitrate sensor, SeaBird Deep SUNA
- chlorophyll/turbidity sensor, SeaBird WetLabs ECOtriplet (FLBBCD)
- side scan sonar (= acoustic ”camera”), EdgeTech 2205. Frequencies 75/410 kHz (1-6 km range)
- bottom-penetrating sonar (= acoustic ”X-ray camera”), EdgeTech DW216 with configurable chirp
- navigation system: DVL-supported Honeywell Hg9900, gives accuracy of better than 0.08% of distance travelled
- acoustic communication below surface, 2-3 km between ship and AUV
- satellite, radio and WiFi communication in surface mode