Ran - autonom undervattensfarkost
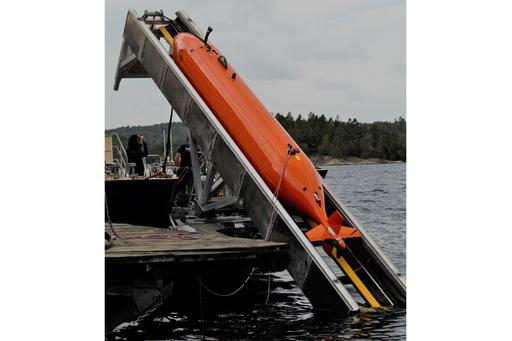
Med en autonom undervattensfarkost (AUV) kan forskare undersöka vad som händer under glaciärer, tjock havsis och i djuphaven. AUV:n Ran användes ofta vid R/V Skageraks expeditioner och bidrog med unika data och vetenskapliga upptäckter. När Ran gick förlorad under ett uppdrag i Antarktis i januari 2024 avslutades ett framgångsrikt kapitel. Nu ska Ran ersättas av en ny farkost. Ran II kommer föra arbetet vidare med att öka kunskapen om havets processer.
Den autonoma undervattensfarkosten Ran användes under flera år för många olika uppdrag vid Göteborgs universitet. När AUV:n försvann i Västantarktis i början av 2024 hade den bidragit med en rad nya rön, särskilt inom forskningen om Antarktis.
Till skillnad från en fjärrstyrd farkost är Ran en autonom undervattensfarkost som för-programmeras att dyka ner under ytan och fatta egna beslut baserat på information om omgivningen. På det sättet kan Ran nå mycket otillgängliga miljöer under flytande ismassor eller i djuphaven.
Fåtal AUV:er med samma kapacitet
Endast ett fåtal AUV:er i världen som används för forskning har samma exceptionella kapacitet och navigeringsnoggrannhet. Göteborgs universitets Ran var dessutom utrustad med högupplösande akustiska sonarer och andra karteringsinstrument.
Ran finansierades av Knut och Alice Wallenbergs Stiftelse inom ramen för programmet MUST (Mobile Underwater System Tools) för nationellt viktig infrastruktur.
De mest riskfyllda – och mest banbrytande – resultaten kom under expeditionerna under Antarktis flytande glaciärer. Anna Wåhlin, professor i oceanografi vid Göteborgs universitet, framhåller att Ran inte bara bidrog till ny forskning, utan också till utbildning och teknikutveckling:
Under sina aktiva år användes Ran både i forskning och i utbildning av unga forskare, samt som plattform för tester och övningar inom det svenska AUV-utvecklingsprojektet SMARC (Swedish Maritime Robotics Centre). Enligt Anna Wåhlin har detta bidragit till att Sverige i dag har en ledande position inom AUV-baserad polarforskning och ligger i framkant internationellt.
Ran II på ingång
Efter förlusten av Ran har Göteborgs universitet, med stöd av en generös donation från Voice of the Ocean och Eric Douglas, kunnat planera nästa steg. Ran II – med förbättrad navigering, beslutsstöd och säkerhetssystem – kommer att levereras under vintern 2026/2027 och föra arbetet vidare med att öka kunskapen om havets processer och klimatförändringar.
Forskningsresultat
- First look under imperilled Antarctic glacier finds ‘warm water coming from all directions’
- Pathways and modification of warm water flowing beneath Thwaites ice shelf, West Antarctica
Data
Nyheter
- Journey to Antarctica: How We’ll See Deep Beneath the Ice
- A Submarine Goes Under a Failing Glacier to Gauge Rising Seas
- This submarine’s historic tour under Thwaites Glacier will help scientists predict sea level rise
- Scientist borrow Swedish submarine to investigate earthquake's impact on Kaikōura's sea floor (på engelska)
- Forskning med Ran i Kaikōura Canyon, Nya Zeeland (på engelska)

Fakta Ran
Tillverkare: Kongsberg Maritime A/S, Horten, Norge
Modell: Hugin
Längd: 7,5 meter
Vikt: 1850 kg (torr)
Hastighet: 1-7 knop, marschfart 4 knop
Maximalt dykdjup: 3000 meter
Maximal längd och tid för dyk: 300 km och 36 h
Utrustning
- Multibeam-ekolod, Multibeam Kongsberg EM2040, 200-400 kHz, 0,7° x 0,7° beam width, swath coverage sector up to 140°
- CTD = mätare för konduktivitet (praktisk salinitet), temperatur och tryck (djup), SeaBird 911 19plusv2 (dubbla system)
- Syrgasmätare, SeaBird SBE43 (dubbla system)
- Koldioxidmätare, Contros HydroC
- Nitratmätare, SeaBird Deep SUNA
- Klorofyll-/turbiditetsmätare, SeaBird WetLabs ECOtriplet (FLBBCD)
- Sidscannande sonar (= akustisk ”kamera”), EdgeTech 2205. Frekvenser 75/410 kHz (1-6 km range)
- Bottenpenetrerande sonar (= akustisk ”röntgenkamera”), EdgeTech DW216 med konfigurerbar chirp
- Positioneringssystem DVL-supporterad Honeywell Hg9900, ger en noggrannhet på bättre än 0.08% av färdavstånd
- Akustisk kommunikation under vattnet, 2-3 km mellan fartyg och AUV
- Satellit-, radio- och WiFi-kommunikation i ytläge